Tanto los motores de CA como los de EC son motores eléctricos. Los motores eléctricos desempeñan un papel crucial en la vida diaria, ya que están involucrados en el funcionamiento de innumerables dispositivos y sistemas de los que dependemos. En aplicaciones domésticas, se pueden encontrar en refrigeradores, lavadoras, acondicionadores de aire, aspiradoras, etc. Los sistemas HVAC dependen de motores eléctricos para circular el aire, regular la temperatura y mantener el confort en hogares, oficinas y otros edificios. También en el transporte, la industria y la manufactura, los motores eléctricos juegan un papel fundamental. En este artículo explicamos de manera comprensible las diferencias entre los motores de CA y los motores de EC. Se discuten brevemente las opciones para controlar un motor de CA y las ventajas y desventajas de las tecnologías mencionadas.
Los motores eléctricos funcionan basándose en la interacción entre el magnetismo y las corrientes eléctricas
Un motor eléctrico es una máquina que convierte la energía eléctrica en energía mecánica. Principalmente, el motor convierte la energía eléctrica en movimiento rotatorio. La energía eléctrica o potencia se expresa en kW, mientras que el movimiento rotatorio se expresa en rpm. Por lo tanto, la potencia eléctrica [kW] es convertida por el motor en movimiento rotatorio [rpm]. Pero eso no es suficiente. Además de la energía eléctrica, se requiere magnetismo. Algunos motores utilizan imanes permanentes, mientras que otros tipos de motores crean sus propios campos magnéticos mediante bobinas y corrientes eléctricas.
Un motor eléctrico funciona mediante una interacción dinámica de fuerzas magnéticas. Cuando se aplica una corriente eléctrica, esta genera un campo magnético que interactúa con imanes situados en un componente giratorio. Esta interacción induce el movimiento rotatorio, ejemplificando la conversión de energía eléctrica en movimiento mecánico. El motor actúa como un mecanismo sofisticado donde la sinergia orquestada entre la electricidad y el magnetismo facilita un movimiento rotatorio controlado y con un propósito definido, sustentando una amplia variedad de aplicaciones en todas las industrias, incluida la industria HVAC.
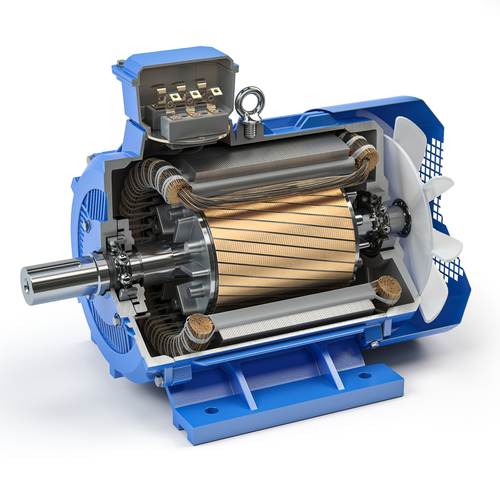
Un motor está compuesto por un estator y un rotor. El estator es la parte estática del motor — la parte fija que se utiliza para montar el motor al conducto de aire o instalación. El rotor es la parte giratoria sobre la cual se monta el eje del motor. En un ventilador, las aspas están montadas en este eje del motor (en el rotor). El rotor generalmente tiene forma cilíndrica. En el estator se genera un campo magnético mediante electromagnetismo. La corriente eléctrica circula por el bobinado del motor en el estator y genera un campo magnético. Debido a que se trata de voltaje alterno y se usan varios bobinados, este campo magnético gira alrededor del rotor. El rotor sigue este campo magnético giratorio. Se puede comparar con imanes que se atraen entre sí.
Durante el proceso de conversión de energía eléctrica en energía mecánica, una parte de la energía se pierde. Estas pérdidas energéticas son causadas por la generación de calor, la fricción mecánica y otras pérdidas eléctricas en el motor. La eficiencia de un motor eléctrico indica qué parte de la energía absorbida está disponible en el eje del motor. La eficiencia generalmente se indica en la placa de características mediante el símbolo η expresado en %. η = 85% significa que se pierde el 15% de la energía eléctrica absorbida. Cuanto mayor es la eficiencia del motor, menores son las pérdidas y más energía se convierte en torque. La fuerza con la que se realiza el movimiento rotatorio se llama torque y se expresa en Nm.
Motores de CA – motor asíncrono vs motor síncrono
Los motores de CA son el estándar para aplicaciones industriales. Este tipo de motor también se usa regularmente en el sector HVAC, especialmente en capacidades mayores. Los motores de CA son muy fiables, robustos y fáciles de mantener. Se distinguen los motores de CA síncronos y asíncronos.
Motor asíncrono
El motor asíncrono estándar es el motor eléctrico más simple y más utilizado en HVAC y en automatización industrial. Es un concepto probado que es rentable, robusto y fiable. Los motores asíncronos son relativamente fáciles de mantener y en muchos casos su velocidad puede controlarse fácilmente. Gracias al progreso tecnológico, ahora existen soluciones más eficientes energéticamente, pero estas también tienen un coste más elevado.
El principio de funcionamiento de un motor asíncrono es un poco más difícil de explicar de manera sencilla. El motor asíncrono no tiene un rotor con imanes permanentes; su campo magnético se crea por inducción. Para que esto sea posible, el rotor está compuesto por conductores eléctricos. Estas barras conductoras suelen estar hechas de aluminio o cobre. Están montadas en el rotor cilíndrico y están conectadas en ambos extremos por anillos de cortocircuito. Todo tiene una forma parecida a una jaula — por eso se llama rotor de jaula de ardilla. Debido al principio de inducción (ley de Faraday), la corriente eléctrica fluye a través de estos conductores. Por esta razón, un motor asíncrono también se llama motor de inducción. Esta corriente del rotor crea un campo magnético que interactúa con el campo del estator, haciendo que el motor gire.
A diferencia de un motor síncrono, un motor asíncrono siempre gira más lento que el campo magnético del estator. Esta diferencia se llama deslizamiento (slip). Debido a esta diferencia, se induce una corriente inversa en el rotor del motor asíncrono. Cuanto mayor es la carga, mayor es la diferencia (deslizamiento). El rotor acelera hasta que la magnitud de la corriente inducida en el rotor y el torque del motor equilibran la carga en el eje del motor. Como no hay corriente inducida en el rotor (no hay torque) a la velocidad síncrona, un motor de inducción siempre funciona a una velocidad menor que la velocidad síncrona.
Motores síncronos
Los motores de CA síncronos son tecnológicamente más complejos que los motores asíncronos. Utilizan imanes permanentes, lo que los hace más costosos. La gran ventaja es su menor consumo de energía. Un motor síncrono es menos fácil de controlar que un motor asíncrono. Por lo general, se requiere un tipo específico de controlador de frecuencia para controlarlos. Los motores síncronos no pueden ser controlados con un controlador de velocidad por transformador ni con un controlador electrónico de velocidad.
Como se mencionó anteriormente, en el estator se crea un campo magnético giratorio. Un motor síncrono tiene un rotor compuesto por imanes permanentes. Los polos magnéticos opuestos se atraen mutuamente. Por lo tanto, los imanes del rotor seguirán exactamente (de manera síncrona) el campo giratorio del estator, sin importar la carga.
Controladores de velocidad para motores de CA
Los motores síncronos generalmente consumen menos energía que los motores asíncronos, pero solo pueden usarse en combinación con un variador de frecuencia. Los motores asíncronos ofrecen la opción de ser controlados o no mediante un controlador de velocidad. Los controladores de velocidad ayudan a reducir el choque mecánico durante el arranque. Gracias a los controladores de velocidad, muchas aplicaciones pueden controlarse de forma más cómoda y precisa. Basta pensar en la ventilación controlada por demanda, donde los controladores optimizan el flujo de aire y combinan una buena calidad del aire interior con ahorro energético.
En aplicaciones HVAC, los ventiladores con motores asíncronos pueden controlarse con un variador de frecuencia o con un controlador de velocidad para ventiladores. Ambos tienen sus ventajas y desventajas. Un variador de frecuencia ofrece el control más preciso y es eficiente energéticamente. Un controlador de velocidad para ventiladores es más barato y mucho más fácil de instalar y usar.
Un inversor de frecuencia optimiza tanto el voltaje del motor como la frecuencia de la corriente del motor mediante modulación por ancho de pulso. Esto requiere IGBTs. Los Transistores Bipolares de Puerta Aislada son componentes electrónicos de alto rendimiento que pueden conmutar corrientes eléctricas de alta potencia a frecuencias muy altas. Esta tecnología permite un control óptimo del motor, pero no es barata. Por lo general, se elige un controlador de frecuencia V/f o escalar para controlar ventiladores. Un variador de frecuencia escalar mantiene la relación V/f constante (torque constante) en todo el rango de velocidad. Estos son los variadores de frecuencia más simples, dado que requieren pocos datos del motor para la unidad de control. Solo se necesita una configuración limitada para controlar el motor. V/f es el único método de control que permite controlar varios motores con un solo variador de frecuencia. En tales aplicaciones, todos los motores arrancan y se detienen al mismo tiempo y siguen la misma referencia de velocidad.
A diferencia de un variador de frecuencia, un controlador de velocidad para ventiladores solo varía el voltaje del motor. Este tipo de controlador de velocidad solo es adecuado para motores controlables por voltaje y, por lo tanto, puede usarse en aplicaciones donde el torque disminuye con la velocidad, por ejemplo, en el control de ventiladores. La gran ventaja de este tipo de controlador es su funcionamiento sencillo y el precio. No se necesita configuración; una vez conectado todo, el ventilador puede controlarse inmediatamente. La construcción de un controlador de velocidad para ventiladores es mucho más simple que la de un variador de velocidad variable. Esto también se refleja en el costo. Se pueden usar diversas tecnologías para los controladores de velocidad para ventiladores, cada una con sus ventajas y desventajas específicas. Las tecnologías más utilizadas son: controladores de velocidad por transformador (controlador de 5 pasos) o controladores electrónicos de velocidad para ventiladores (control de ángulo de fase TRIAC).
¿Cómo ajustar la velocidad solicitada del ventilador de CA?
Independientemente del tipo de controlador de velocidad para motores de CA o inversor de frecuencia, el usuario debe poder especificar la velocidad deseada. Esto se puede hacer de diferentes maneras. Por un lado, distinguimos controladores de velocidad que tienen los controles integrados en el propio dispositivo; por otro lado, dispositivos que requieren una señal eléctrica externa con la cual se pueda ajustar la velocidad deseada. Esta señal externa puede ser analógica (por ejemplo, 0-10 Voltios) o digital (por ejemplo, comunicación Modbus RTU). Las posibilidades para ajustar la velocidad deseada mediante una señal eléctrica externa se discuten en detalle en el artículo sobre potenciómetros.
Motores EC – motores con controlador de velocidad incorporado
Los motores eléctricos de corriente continua sin escobillas también se denominan motores conmutados electrónicamente (motores EC). Son motores síncronos que funcionan con corriente continua a través de un controlador (de velocidad) integrado. Sin embargo, los motores EC se conectan a corriente alterna (tensión de red). Esta corriente alterna se convierte internamente en corriente continua, con la cual el controlador integrado regula el motor.
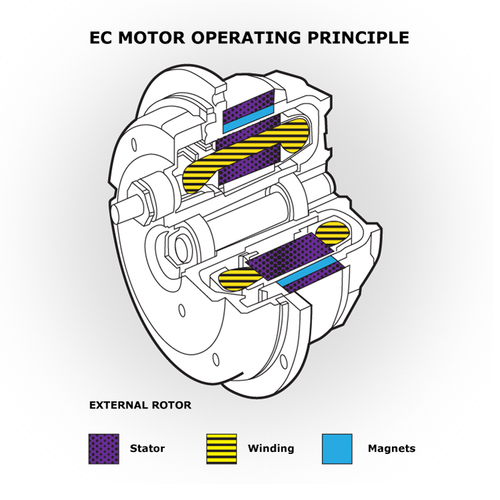
Los motores EC generalmente tienen un rotor hecho de imanes permanentes que giran alrededor de un estator. El regulador incorporado contiene un rectificador que convierte la tensión de alimentación de CA en corriente continua (CC). Luego, el regulador integrado envía la cantidad adecuada de corriente, en la dirección correcta y en el momento adecuado, a través de los devanados del estator. Esto crea un campo magnético giratorio en el estator, que impulsa el rotor con imanes permanentes. La posición de cada imán del rotor se determina mediante sensores Hall. Los imanes correspondientes son atraídos secuencialmente hacia los polos magnéticos del estator. Al mismo tiempo, el resto de los devanados del estator se cargan con polaridad invertida. Estas fuerzas de atracción y repulsión se combinan para lograr una rotación suave y producir el par óptimo. Debido a que todo esto se realiza electrónicamente, es posible un control y monitoreo precisos del motor. Por lo tanto, un motor EC puede considerarse la combinación de motor y controlador de velocidad en una sola carcasa.
Los motores EC suelen ser más caros en comparación con los motores de CA, pero ofrecen algunas ventajas. Las principales son: una alta relación par/peso debido a su construcción más compacta y un menor consumo energético en comparación con los motores de CA. Los imanes permanentes y la electrónica integrada hacen que este tipo de motor sea más costoso. El motor y el controlador de velocidad del ventilador están combinados en una sola carcasa. Si el motor EC puede controlarse directamente mediante comunicación Modbus, todos los parámetros del motor, como la temperatura en los devanados, consumo de energía, velocidad de rotación, contador de horas, etc., pueden leerse de forma remota. La puesta en marcha puede ser más complicada, pero una vez instalado, esta solución ofrece más opciones, especialmente en términos de integración en sistemas BMS o sistemas de ventilación inteligentes.
¿Cómo ajustar la velocidad del ventilador EC?
Al igual que los controladores de velocidad para motores de CA, los motores EC también pueden controlarse mediante una señal eléctrica externa (también llamada señal analógica) o mediante comunicación Modbus RTU. Una señal analógica puede generarse manualmente mediante un potenciómetro o automáticamente a través de un sensor HVAC. De esta manera, los ventiladores con motor EC pueden controlarse tanto mediante un potenciómetro como mediante sensores HVAC.
Las siguientes imágenes ofrecen una visión general de las posibilidades para controlar un motor de CA o un motor EC:
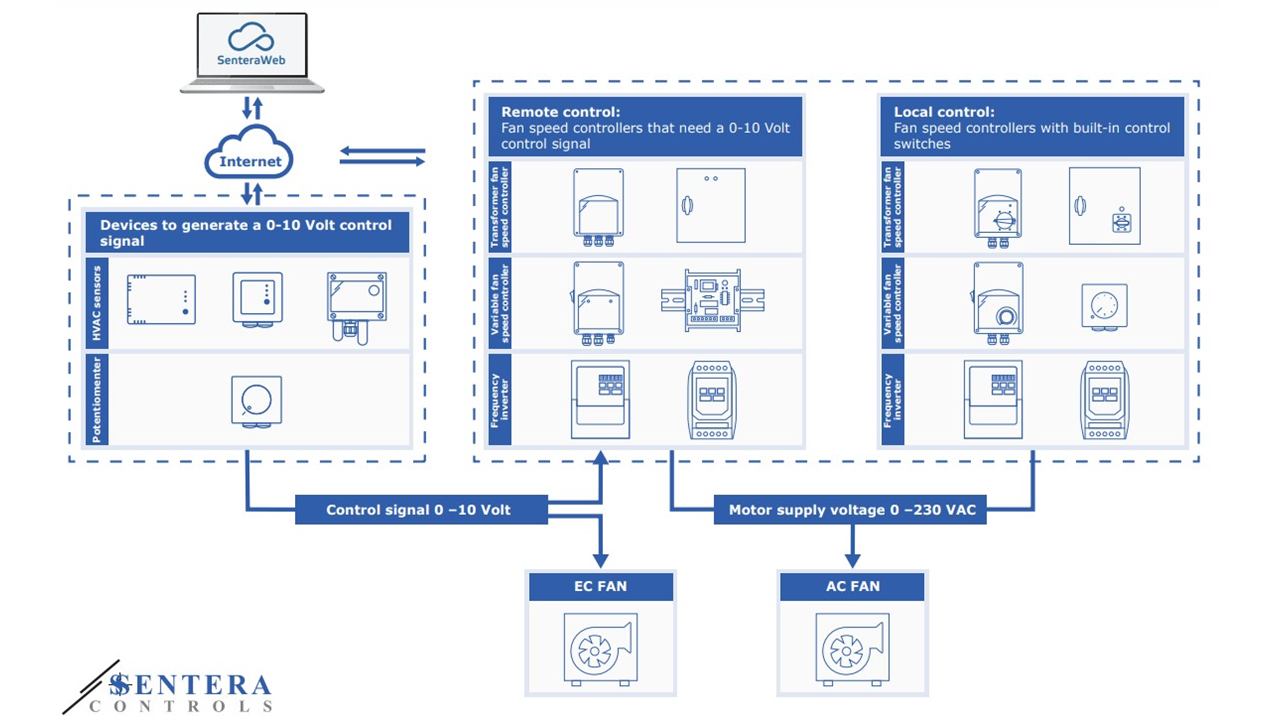
Más detalles se pueden encontrar en nuestro sitio web — soluciones — ¿Cómo controlar un ventilador?