Wat is een PI-regeling?
PI-regeling is de afkorting van proportioneel-integraalregeling. PI-regeling is een veelgebruikte methode in regelsystemen om de fout tussen de gewenste instelwaarde en de gemeten waarde te corrigeren, op basis van een bepaald type terugkoppeling, bijvoorbeeld een sensorwaarde. De PI-regelaar berekent een correctie door het verschil te nemen tussen de gewenste waarde en de gemeten waarde. Als alle parameters correct zijn ingesteld, stuurt het PI-algoritme het systeem zo aan dat de gemeten waarde overeenkomt met de gewenste instelwaarde, met een minimale vertraging en zonder overschrijding.
Typische toepassingen waarbij PI-regeling kan worden gebruikt:
- Het regelen van de ventilatorsnelheid om het luchtdebiet constant te houden. Dit kan interessant zijn wanneer de toevoer van verse lucht in verschillende ruimtes varieert en er één centrale toevoerventilator wordt gebruikt.
- Het regelen van de stand van een klepblad om het luchtdebiet naar een bepaalde ruimte constant te houden wanneer de toevoer van verse lucht varieert.
Een PI-regelalgoritme maakt gebruik van een combinatie van proportionele en integrale regeling.
Proportionele regeling – Kp
De P staat voor proportionele regeling en bepaalt de omvang van de berekende correctie. Hoe dichter de gemeten waarde bij de ingestelde waarde ligt, hoe kleiner de correctie zal zijn. Het uitgangssignaal van een proportionele regelaar is recht evenredig met de fout.
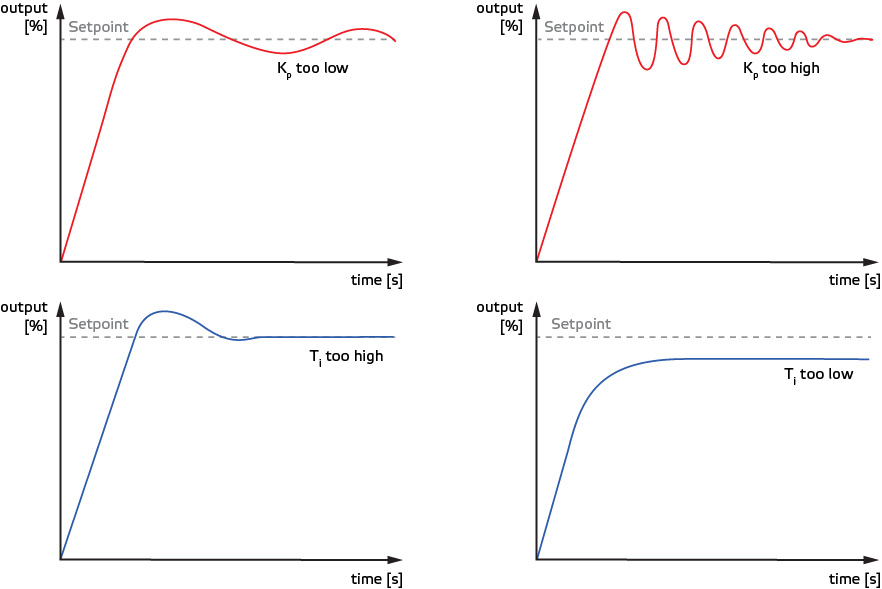
Een lage Kp-waarde zorgt voor een trage reactie.
Een hogere Kp-waarde maakt de regelaar sneller en agressiever in het corrigeren van afwijkingen ten opzichte van het instelpunt. Het verschil tussen de gemeten en gewenste waarde wordt daardoor sneller gecompenseerd.
Als de Kp-waarde te hoog is ingesteld, kan dit leiden tot oscillatie. De gemeten waarde zal dan constant schommelen rond de gewenste waarde. Bij het instellen van een PI-regelaar is het belangrijk om eerst de Kp-waarde te optimaliseren. Het fijnstellen kan vervolgens gedaan worden door het aanpassen van de Ti-waarde.
Integrale regeling – Ti
De I staat voor integrale regeling en kijkt naar hoe het verschil tussen de ingestelde en de gemeten waarde in de tijd evolueert tijdens het toepassen van correctie. De integrale regelaar wordt gebruikt om de afwijking te corrigeren en kan worden beschouwd als een aanpasbare instelwaarde voor de PI-regellus.
Zowel Kp als Ti zijn parameters die handmatig kunnen worden ingesteld in de PI-regelaar. Wanneer deze functie geactiveerd (en beschikbaar) is, kan de auto-tune functie van de PI-regelaar automatisch de optimale Kp- en Ti-waarden berekenen, op basis van de real-time respons van het proces op verschillende regelwaarden.
Onderstaande grafieken tonen het effect van verschillende Kp- en Ti-instellingen: