What is PI control?
PI control is the abbreviation of Proportional Integral control. PI control is a commonly used method in control systems to correct the error between the desired setpoint value and the actual value based on some type of feedback, for example a sensor measurement. The PI controller calculates a correction by taking the difference between the desired set point and the measured value. If all parameters are set correctly, the PI algorithm controls the system so that the measured value corresponds to the desired setpoint value with a minimal delay and overshoot.
Typical applications in which PI control can be used are:
- Controlling fan speed to keep the airflow volume constant. This can be interesting when the supply of fresh air in different rooms is variable and one central supply fan is used.
- Controlling a damper blade position to keep the airflow volume to a given space constant when the fresh air supply is variable.
A PI control algorithm uses a combination of proportional and integral control.
Proportional control - Kp
Typical applications in which PI control can be used are:
- Controlling fan speed to keep the airflow volume constant. This can be interesting when the supply of fresh air in different rooms is variable and one central supply fan is used.
- Controlling a damper blade position to keep the airflow volume to a given space constant when the fresh air supply is variable.
A PI control algorithm uses a combination of proportional and integral control.
Proportional control - Kp
P stands for Proportional control and represents the size of the calculated correction. The closer the measured value is to the set point, the smaller the correction will be. The output signal of a proportional controller is proportional to the error. A low Kp-value will cause a slow reaction. A higher Kp-value makes the controller more aggressive at responding to errors away from the set point. The difference between the measured value and the desired value will therefore be compensated more quickly. If the Kp value is set too high, oscillation will occur. The measured value will constantly fluctuate around the desired value. With a PI controller it is important to always optimize the Kp-value first. The fine tuning can then be done by adjusting the Ti value.
Integral control - Ti
I stands for Integral control and looks at how the difference between the desired setpoint and the measured value evolves in time when applying the correction. Integral action is used to remove offset and can be thought of as an adjustable input value for the PI control loop.
Both Kp and Ti are parameters that can be set manually in the PI-controller. When activated (and available), the auto-tune function of the PI Controller calculates the optimal Kp and Ti-values based on the real-time response of the process to different control values.
This diagram shows the effect of different Kp and Ti settings:
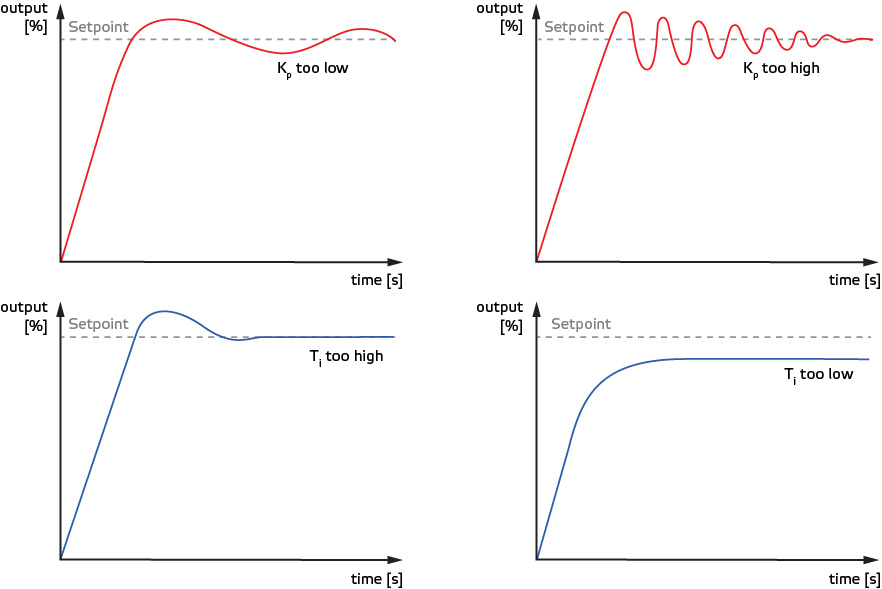
This diagram shows the effect of different Kp and Ti settings: